卫星科普 卫星姿态控制
在空战电影和各大航展中,我们经常看到飞行技术高超的飞行员通过操纵杆控制飞机做出各种动作,比如大名鼎鼎的“眼镜蛇”“落叶飘”等高难度机动,

但无论飞机怎么飞,归根结底都可以用飞机“滚动+俯仰+偏航”三个姿态参数来描述。




如何描述卫星姿态
想象一下自己是超人,正握着双拳向前飞,肚皮朝向地面,身体保持水平。

假如你想翻个身,把肚皮朝向天空,那么这个绕着飞行方向的翻身动作就对应了卫星的“滚动”姿态机动;
“滚动”

假如你想抬头往上飞,那么这个抬头动作就对应了卫星的“俯仰”姿态机动;
“俯仰”

假如你绕着铅垂线方向调个头变成双脚向前倒飞,那么这个调头动作对应了卫星的“偏航”姿态机动。
“偏航”

通过这三个姿态参数就可以描述卫星姿态了。
宋朝的苏轼在《题西林壁》中写道“横看成岭侧成峰,远近高低各不同”。
这句古诗很好地反映了不同视角看待相同事物会有不同的结果,这就需要讲到“参考坐标系”的概念,涉及卫星姿态描述的主要有两类坐标系。
卫星本体坐标系
卫星本体坐标系,顾名思义,这个坐标系是与卫星本体固连的。卫星本体坐标系的原点为卫星质心,三个互相垂直的坐标轴指向一般与卫星布局密切相关,比如首先按照卫星上的相机视轴方向确定Z轴,再按照太阳帆板转轴方向确定Y轴,最终根据右手法则确定X轴。对于地球遥感卫星而言,要求相机视轴即本体系Z轴指向地心,这个方向对应偏航方向;Y轴一般沿轨道面负法向,对应俯仰方向;X轴对应滚动方向,对于圆轨道卫星,该方向一般沿飞行方向。
卫星参考坐标系
主要包括惯性坐标系和轨道坐标系,惯性系是相对于惯性空间保持指向固定的坐标系,如果将其原点放在地心,就称为地心惯性坐标系;如果将其原点放在日心,就是日心惯性坐标系,坐标轴的指向在惯性空间保持不变。轨道坐标系也是一类常用的参考坐标系,多用在对地定向类卫星的姿态定义上。

卫星本体坐标系和参考坐标系之间,可以按一定的转序转动三个角度,使得两个坐标系相互平行;也可以绕空间某特征轴转动一个角度,使得两个坐标系相互平行。对应不同的姿态参数描述方式,但其最终效果是完全等效的。因此,姿态是一种相对关系,姿态的本质是一个旋转过程,最终确定卫星在空间的指向。

如何控制卫星姿态
为了更好地理解姿态控制系统的工作原理,可以想象一下你正在驾驶一辆汽车,你的眼睛可以看到汽车目前的行驶情况,你的大脑能够根据汽车行驶偏离车道的信息决定怎样调整行驶方向,最后由你的手脚来调整方向和速度以使得汽车保持在车道中间。

一个完整的闭环姿态控制系统主要由三部分组成:敏感器、控制器和执行机构,其回路框图如下图所示: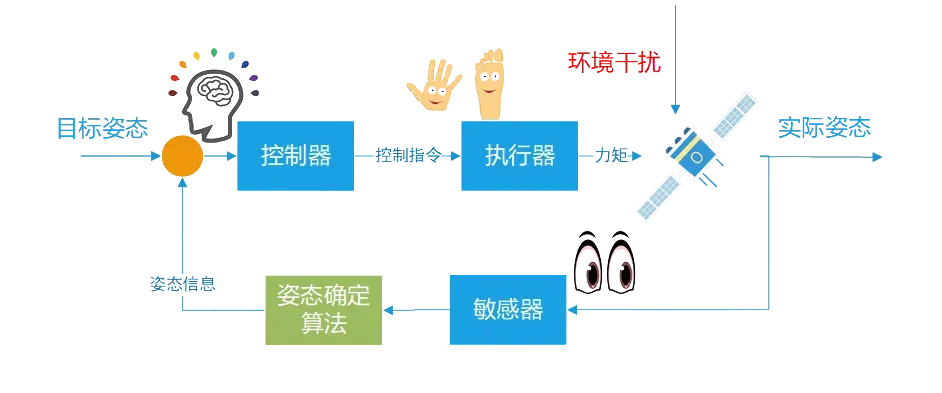
敏感器就像是卫星的“眼睛”,它们可以精确测量卫星的姿态,经过算法处理可进一步过滤掉测量中的噪声和误差,这就是姿态确定的过程,并将这些姿态信息传递给控制器,这是进行姿态控制的前提。常见的卫星姿态敏感器有太阳敏感器、星敏感器、半球谐振陀螺、光纤陀螺等。

控制器就像是卫星的“大脑”,通过使用敏感器传递过来的姿态信息与系统输入的目标姿态进行决策,确定卫星需要采取的下一步动作,将控制指令传递给执行机构。常见的控制器包括姿轨控计算机、星载微处理器等硬件产品,以及星务、信息处理、控制算法等软件。

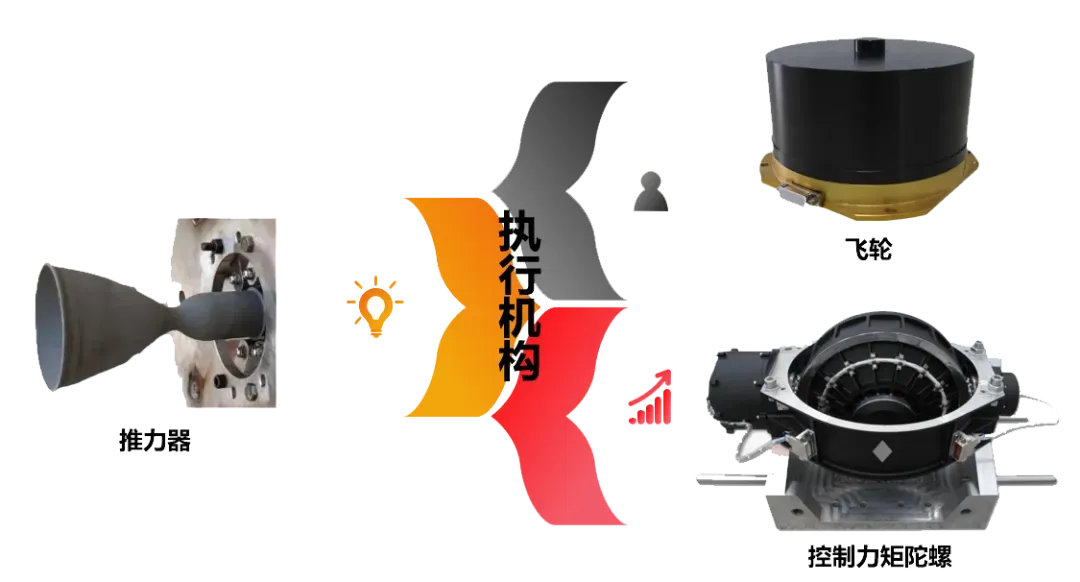
执行机构就像是卫星的“手脚”,根据控制器传递过来的指令信息执行、输出相应的力矩,从而改变卫星的姿态。常见的执行机构有飞轮、控制力矩陀螺、推力器等,其中飞轮、控制力矩陀螺通过角动量交换的原理改变卫星的角速度,推力器通过施加不通过质心的力而产生力矩。